Indoor Positioning Systems: Vergelijkende studie van methoden voor efficiënt stockbeheer in de agro-food sector
Abstract
Een goed stock beheer is een belangrijke component om voor elk product in de agro-food ketting de bewaar en transportomstandigheden bij te houden. Deze korte studie vergelijkt methoden die KMO’s kunnen helpen om efficiënt de plaats en bewaaromstandigheden van hun producten bij te houden. De KMO zich inzetten om meer manueel werk uit te voeren en beter te labellen, te investeren in sensoren dicht bij de voedingsmiddelen geplaats worden en die zelf hun positie in het bedrijf bepalen of investeren in een systeem die door middel van camerabeelden producten kunnen herkennen en hun positie in het bedrijf kunnen volgen. Deze 3 methoden leveren positie data op die, naast een beter stock beheer, ook een essentiële component voor Augmented reality/Virtual reality componenten of een digital twin van het bedrijf.
Introductie
Indoor positioning system (IPS) is een systeem om de positie van objecten binnen een ruimte te bepalen. In het iStorage4SME project wordt IPS gebruikt om een datastroom te genereren met posities van objecten in een ruimte. Deze datastroom kan daarna gebruikt kan worden in een Augmented/Virtual Reality applicatie of digital twin. Drie manieren om posities van objecten te bepalen werden onderzicht: op basis van signalen, beelden en manuele registratie. Om een positie van een object te bepalen door middel van signalen (GSP, SIM, BLE, WIFI) moet het object door minstens drie ontvangers/antennes/satelieten[1] gedetecteerd kunnen worden. Een gekend systeem om posities van objecten te bepalen is het global positioning system (GPS), wat geïntegreerd is in bijvoorbeeld de routeplanner van auto’s en vrachtwagens. Google combineert deze techniek ook binnenshuis met behulp van zijn indoor maps[2]. Een alternatief[3] wordt gebruikt in mobiele telefoons waarbij elke actieve telefoon connectie maakt met de dichtstbijzijnde GSM of 5G antenne, maar evenzeer met WIFI en bluetooth toestellen in de buurt[4][5]. Als de mobiele telefoon met meerdere toestellen connectie maakt, kan heel nauwkeurig de positie van een GSM bepaald worden. Naast positiebepaling met behulp van signalen, kunnen ook beelden gebruikt worden. Hierbij worden camera, satelliet beelden of foto’s gecombineerd met en Artificiële intelligentie zoals bijvoorbeeld gezichtsherkenning[6] om objecten te detecteren en hun positie te bepalen. Een laatste manier is het gebruik van een warehousing systeem waarbij manueel aan elk object een vaste plaats wordt toegewezen[7]. In het iSTorage4SME werden deze technieken om IPS toe te passen naast elkaar vergeleken in een beslissingsmatrix en uitgetest voor toepassingen in de agrofood-sector.
Materialen en methoden
Om de IPS technieken uit te testen werd een opslagplaats gevuld met kubusvormige palloxen gevuld met witloofwortelen (Figuur 1). In deze palloxen werden Bluetooth sensoren geplaatst (Figuur 2A), tijdens het vullen van de frigo werden regelmatig foto’s genomen van de opslagruimte en de positie van elke pallox werd manueel genoteerd in een Excel formulier onder de vorm: Rij, kolom en hoogte. Waarbij rij 1 de rij palloxen was tegen de achterste muur, kolom 1 de kolom palloxen tegen de linker muur en hoogte 1 de pallox die op de vloer staat.

Figuur 1 opslagruimte met witloofpalloxen (Inagro)
Voor elke bluetooth sensor werd de signaalsterkte tot de antenne opgeslagen (Figuur 2C). Om de positie van de palloxen te bepalen werd een computer vision model getraind die palloxen, vorkheftruck en personen in de ruimte konden detecteren (Figuur 2B). Dit getraind model werd als input gebruikt om de palloxen te volgen binnen de opslagruimte en de positie werd vertaald naar een positie op het grondplan van de ruimte[8].

Figuur 2 illustratie van de proefopzet. A) plaatsing van Bleutooth sensoren aan de zijkant van de pallox (groen) en BLE sensor aan de bovenkant van de pallox (rood). B) Voorbeeld van een object detectie model getraind om personen, palloxen en vorkheftrucks te detecteren. C) Voorbeeld van de signaalsterkte van BLE sensoren geplaatst in een diepvries.
Resultaten en discussie
De vergelijking tussen verschillende technieken om tot (indoor) positioning te komen werd opgemaakt in het iStorage4SME project. Er werd tijdens het project dieper ingegaan op Bluetooth low energy positioning , positioning op basis van AI en camera beelden en positioning op basis van cijfers ingevuld op papier.
Manueel noteren van de positie van de palloxen in de ruimte is de meest toegankelijke manier om een warehousing systeem op te zetten. Dit kan nog vereenvoudigd worden door labels toe te voegen aan de palloxen en in de ruimte om zo de pallox en locatie te scannen en automatisch op te slaan in een warehousing systeem. De signaalsterkte van de bluetooth sensoren (Figuur 3A) was veel lager dan verwacht door het absorberen van de signalen door de waterhoudende voedingsmiddelen rond de sensoren. Een deel van de sensoren die in palloxen geplaats werden in het midden van de opslagplaats werden zelfs helemaal niet meer gedetecteerd. Op basis van de foto’s kon de positie van de palloxen vertaald worden naar het grondplan van de ruimte (Figuur 3B). Deze positie klopt echter enkel voor palloxen en objecten die op de grond staan.
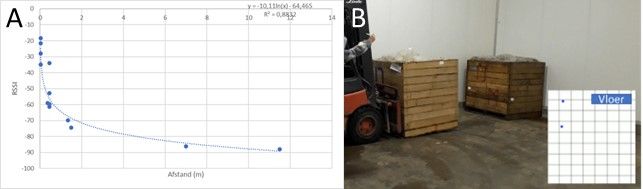
Figuur 3 illustratie van de resultaten. A) signaalsterkte van een BLE toestel in open lucht, waar een signaal hoger dan -90 niet meer gemeten werd, dit was op een afstand van > 10 meter. B) 2D indoor positioning van 2 palloxen die op de vloer geplaatst werden. het grondplan van de vloer van de frigo (rechts onder) toont de positie van de 2 palloxen als blauwe punten.
Verder in het iStorage4SME project worden de mogelijkheden van 3D object tracking op basis van diepte camera beelden verder bekeken zodat ook de positie van objecten die niet op de vloer geplaats worden bepaald kan worden.
Conclusie
Een warehousing systeem waarbij de locatie van elke pallox manueel geregistreerd wordt in de opslagplaats is de meest rechtlijnige aanpak voor KMO’s met opslagplaatsen met waterhoudende voedingsproducten in bulk. Wanneer manuele registratie niet haalbaar is, kan AI gecombineerd met camerabeelden een oplossing bieden. De aanpak om objecten die op de vloer staan in 2D te tracken kan uitgebreid worden naar 3D object tracking. In iStorage4SME tonen we aan dat 3D object tracking technisch mogelijk is, maar de techniek nog niet op punt om toe te passen bij KMO’s. Voor bedrijven die indoor positioning willen doen voor objecten die op de grond staan en waarbij de producten de Bluetooth signalen minder absorberen, zijn pakketten reeds commercieel beschikbaar om IPS op basis van Bluetooth te gebruiken.
[1] https://actisense.com/news/gps/#:~:text=A%20minimum%20of%203%20Satellites,only%20measures%20distance%2C%20not%20angles.&text=Trilateration%20works%20by%20using%20the,the%20distance%20from%20each%20satellite.
[2] https://www.google.com/maps/about/partners/indoormaps/
[3] https://en.wikipedia.org/wiki/Mobile_phone_tracking#:~:text=The%20technology%20of%20locating%20is,the%20cell%20phone%20is%20nearby.
[4] https://zerynth.com/blog/indoor-people-tracking-building-a-wifi-sniffer-with-zerynth/
[5] https://www.manxtechgroup.com/people-counting-using-wifi-and-bluetooth/
[6] https://en.wikipedia.org/wiki/Mass_surveillance_in_China#Surveillance_cameras
[7] https://logistikknowhow.com/en/storage-techniques/allocation-strategies-for-warehouse-and-picking-systems-warehouse-operation-strategies/
[8] https://www.linkedin.com/pulse/journey-towards-creating-basketball-mini-map-stephan-janssen/